In this article, you will learn all about the final ground risk class (GRC) in connection with SORA.
In the previous article, we looked at a key component of risk analysis for drones. It is exciting for aviation in several respects, as it contributes to the comprehensive risk analysis for the planned drone mission and specifically takes uninvolved persons into account in addition to the requirements of aviation law. To recap, here are the influencing factors for determining the initial ground risk:
- Flight route and the people at risk there
- Drone used and its characteristics
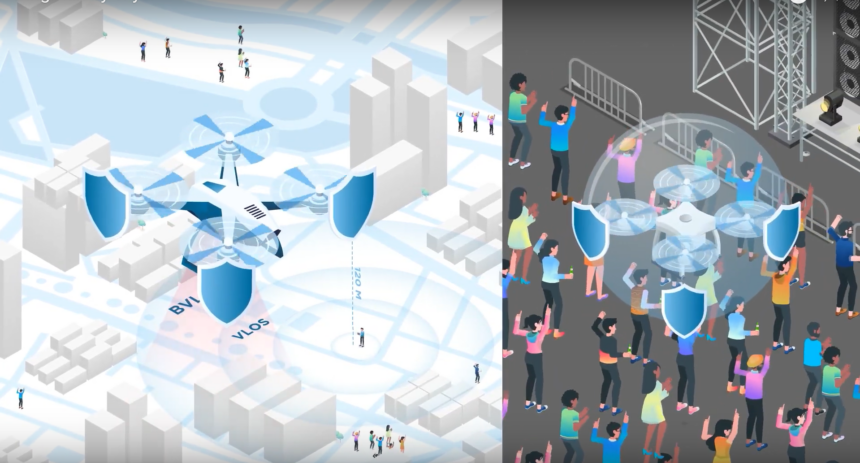
- Operating mode (VLOS/BVLOS)
If you want to fly a large and heavy drone over populated areas or even over crowds of people out of sight, the initial ground risk is correspondingly high. As a high ground risk has a direct impact on the SAIL and therefore on the safety objectives to be met (spoiler! This concerns responsibilities and requirements for the operator, drone and procedure – more on this later), the aim is to minimise this as much as possible.
If this can no longer be achieved with the above-mentioned adjusting screws, mitigations (risk minimisation) can be applied. This term, which is mainly used in English, is also often used in German and in SORA 2.0 refers to three ways of mitigating the ground risk of the drone operation:
- M1 – Strategic mitigation of ground risk
- M2 – Impact effects are reduced
- M3 – An Emergency Response Plan (ERP) is in place, validated by the UAS operator and effective
M1 – Strategic mitigation of ground risk
The aim of this mitigation is to reduce the number of people at risk on the ground. To assess the integrity of M1 mitigation measures, the following points must be considered:
- the definition of a ground risk buffer and the resulting footprint on the ground; and
- the assessment of the people at risk.
1. Ground Risk Buffer (GRB)
The definition of a ground risk buffer in its most conservative form is known to all Open Category pilots as the “1:1 rule“, which states that the flight altitude must be at least equal to the ground risk buffer that must be maintained horizontally to uninvolved persons. If the operation of the UAS is planned at an altitude of 120 metres, the ground risk buffer should be at least 120 metres.
However, the flight altitude should already include the contingency volume – the volume of the operational volume that is used for manoeuvres that can lead the drone out of the flight geometry due to technical or other errors, but have the ultimate goal of leading the operation back into the flight geometry or ultimately to keep the operation under control at all times.
ℹ️ Did you know that, depending on the drone used, wingman can automatically calculate (and reduce!) the ground risk buffer from the mission-specific input data and analyse the ground risk class for it?
Did you know that the use of wingman can fulfil M1 mitigation with medium robustness?
Special case wired drone “Tethered”
If a tethered drone is used, specific mitigation measures must be specified and demonstrated instead.
2. Assessment of the persons at risk
The second criterion for the fulfilment of M1 mitigation concerns the evaluation of persons at risk. Attentive readers will have already wondered how to distinguish sparsely populated areas from populated areas when looking at the table and determining the initial soil risk.
For the SORA , populated area is equated with “congested area” from Regulation (EU) No 965/2012 (the ‘Air Operations Regulation’): “in relation to a city, town or settlement, any area used principally for residential, commercial or recreational purposes“.
This definition is qualitative, as it does not refer to specific population figures or density. If this is used for the SORA, it cannot be assumed from the outset that the area is sparsely populated. However, if it is possible to evaluate how many people are actually at risk in an area using a specific number (i.e. quantitatively), the ground risk can be adjusted accordingly and a case can be made for sparsely populated or sheltered areas. This represents mitigation.
ℹ️ Did you know that wingman calculates the assessment of people at risk from current population density data and can even take dynamic data into account? This provides an easy way to analyse the actual risk of drone deployments and make seemingly impossible deployments possible by applying M1 mitigation.
Impact on the initial ground risk class
If these two strategic measures can be declared (i.e. if their careful implementation and compliance can be demonstrated to the authority), the ground risk in the corresponding column can be reduced by one point, but only up to the first and lowest value of the corresponding column, since a “controlled ground area”, i.e. an area where it can be ensured that no uninvolved persons are present, represents the lowest ground risk.
For a medium robustness of mitigation and a reduction of two points, the technical characteristics of the drone must be taken into account in the ground risk buffer and static population data must be used to estimate the people at risk, which must be proven by documentation and tests or similar means. For the highest level of robustness, the path inevitably leads to validation by EASA or a competent third party.
⚠️ Applying M1 mitigation in populated areas to reduce the ground risk triggers a higher requirement for ensuring the containment of the operation: “enhanced containment”. This results in higher (technical) requirements for the drone.
M2 – Impact effects are reduced
Another mitigation to reduce the ground risk are devices that reduce the energy of the crashing drone on impact with the ground after a loss of control of the operation. One example of this is a parachute system. It should be noted that a reduction of the ground risk by one point can only be achieved from a medium level of robustness. Separate guidelines have been published for this type of mitigation, in which the necessary requirements are listed.

⚠️ The fundamentally positive effect of parachutes is accompanied by an increase in the ground risk buffer due to the uncontrolled drift with the wind upon deployment. It must be checked for each operation whether the advantage of mitigation entails other restrictions.
M3 – An Emergency Response Plan (ERP) is in place, validated by the UAS operator and effective
An Emergency Response Plan (ERP) is part of the basic equipment of a competent operator. It regulates what is to be done if the operation is already out of control and the effects of the event are to be limited. It is therefore hardly surprising that an operation without an ERP adds one point to the ground risk and that a reduction of one point can only be achieved with a high level of robustness.
Basically, it contains clear roles and responsibilities as well as procedures on who is to be notified in an emergency and how, and which activities must be carried out. The entire system must be trained periodically in simulation games and its appropriateness checked. AMC3 UAS.SPEC.030(3)(e) Application for an operational authorisation provides a list of all the necessary elements.
Conclusion
Step 3 of the SORA deals with the reduction of ground risk in different environments, if desired. In SORA 2.0, there are three ways to reduce the initial soil risk class. The possible reductions and their effect on the soil risk class are listed in the following table. The application of mitigations is optional and can be omitted if the soil risk class is appropriate or the safety objectives are met. wingman guides you through the mitigations and gives you tips on how to fulfil them.
| Robustness | ||||
|---|---|---|---|---|
| Mitigation Sequence | Mitigations for Ground Risk | Low/None | Medium | High |
| 1 | M1 – Strategic mitigations for ground risk | 0: None, -1: Low | -2 | -4 |
| 2 | M2 – Effects of ground impact are reduced | 0 | -1 | -2 |
| 3 | M3 – An emergency response plan (ERP) is in place, the UAS operator is validated and effective | 1 | 0 | -1 |