Learn what the ground risk class is, how it relates to SORA and what this means for you when preparing your application for drone flights in the Specific category.
There are only two reasons why you ended up here:
- you already know that your planned drone mission can only take place with an operating licence in the Specific category and you need to carry out a SORA or
- you are as interested in the topic of SORA as I am and want to deepen your knowledge 😉
In both cases, the following article on step 2 of the SORA should be helpful. Among other things, we answer the questions: Can I fly anywhere with the SORA? Can I do the SORA for any drone? For which drone does the SORA make sense? SORA only applies to drones over 25 kg or?
What is the ground risk class?
While in manned aviation every effort is made to ensure the survival of the occupants in the event of an accident (through countless tests and certifications of the components, assemblies and overall system), the focus in unmanned aviation is on how damage to third parties can be avoided and, where unavoidable, minimised as far as possible. Ultimately, the aim is to achieve a level of safety comparable to that of manned aviation.
For this reason, SORA is a comprehensive risk analysis (link What is SORA?) that takes into account both ground and air risks. This means that it not only places the usual aviation requirements on the drone operator. The risk of people, property or critical infrastructure being hit by a drone represents the ground risk and is analysed in step 2 of the SORA after the ConOps has been created. You can read more about how to create the ConOps here: SORA Step 1: What is ConOps – Operational concept
People at risk
Finding out the number of people at risk (uninvolved persons on the ground) is the core of the ground risk. It is clear that the risk increases the more people there are in the flight area. It should therefore already be clear what your flight route looks like before the analysis, which you should ideally draw into a map tool, including the contingency volume and ground risk buffer.
In SORA Version 2.0 (the currently valid SORA version), a distinction is made as to whether your route passes over
- sparsely populated
- populated area or
- over crowded areas.
While gatherings of people are clearly defined (people cannot move freely, e.g. at a concert), SORA 2.0 leaves room for interpretation as to how to define “sparsely populated” and “populated” with numbers. Here it helps to talk to the authorities and find out any national specifications.
SORA 2.5, which is soon to be adopted by EASA, will clarify this in the future. Information on population density is provided by maps of the population density of the respective country.
Drone
The size and weight of the drone naturally also play a role in the ground risk. In principle, however, it can be said that a SORA can be created for any drone that does not fly in the Certified category. This also applies to Open Category drones that are to be flown in Specific Category conditions.
The size of the drone is defined by the maximum characteristic dimension. For multicopters this is the maximum distance between the rotor tips and for fixed-wing aircraft the wingspan. For the weight of the drone, the maximum take-off mass (MTOM), i.e. including payload and fuel as specified in the drone’s operating manual, is used. This mass is used to calculate the typical kinetic energy that occurs in the event of an impact.
Here you can see the parallels to the Open category, in which only certain drones may be flown in the vicinity of people.
B/VLOS
Of course, the type of operation (Am I allowed to fly beyond visual range?) also makes a difference to the risk. In SORA 2.0, the risk is lower if you fly VLOS (=visual line of sight), as it is assumed that you can recognise people on the ground and take measures to fly around them in an emergency.
Initial ground risk
The initial ground risk is made up of the points mentioned above:
- the flight route and the people at risk there,
- the drone used and its characteristics, and
- the operating mode
With this information, you are ready to determine the corresponding ground risk class.
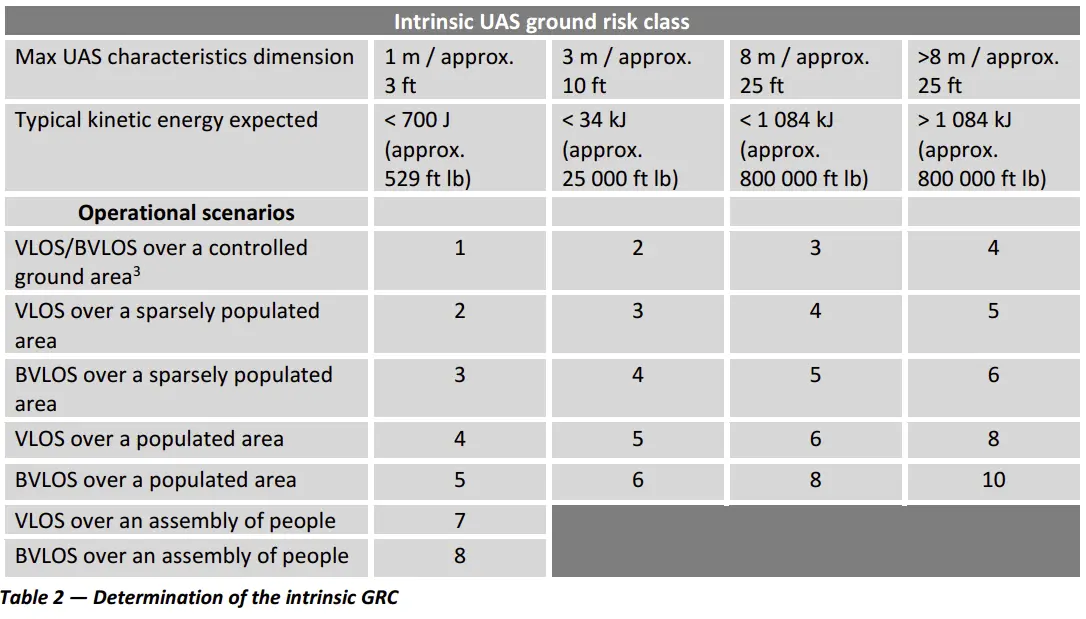
The higher the ground risk class, the higher the operational requirements (see SAIL and OSOs) and flights over crowds of people are only possible with small, lightweight drones.
Mitigations can be used to reduce the requirements (e.g. ensuring a controlled ground area). We will look at these in the next article.
📝 Are you interested in an operating licence?
As experts in the field of drone regulations, we offer you customised advice on all aspects of SORA. We will help you through the complex authorisation process for drone flights in the Specifc category. Please contact us for a non-binding initial SORA consultation.
Summary
Now you’ve seen everything that goes into calculating the ground risk class of your operation. This article highlights the most important aspects of ground risk in step 2 of the SORA. The flight route, the number of people at risk and the characteristics of the drone play a decisive role. Depending on these parameters, the ground risk class is determined, which in turn defines the requirements for drone operation.
Manually collecting data on population density and the drone can be very tedious and leaves room for interpretation. With wingman, the operating volume including contingency volume and ground risk buffer is generated on the basis of the flight route and the drone stored in the profile, the associated ground risk is calculated and displayed so that optimisation potential for a lower risk class can be easily identified at certain points along the flight route.